Motores: O Coração dos Robôs, são os componentes que dão vida aos robôs, permitindo que eles se movimentem e realizem tarefas. A escolha do motor certo é fundamental para o sucesso de um projeto robótico, pois ele define a potência, velocidade e precisão do movimento. Mas quais são os tipos de motores mais utilizados na robótica?
Motores DC (Corrente Contínua)
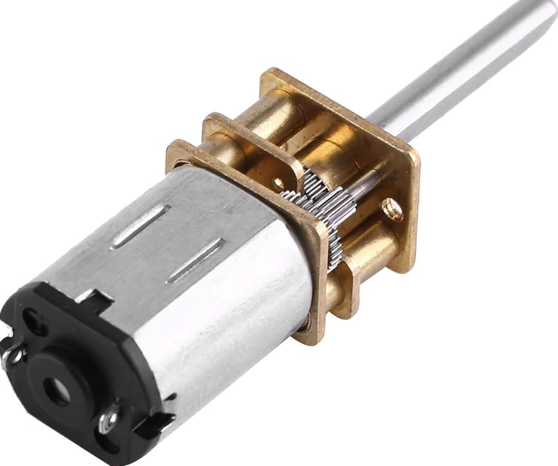
Os motores DC são os mais populares na robótica, especialmente em projetos iniciantes e de menor porte. Eles são relativamente simples de controlar e oferecem um bom equilíbrio entre custo e desempenho.
Vantagens:
- Simples de controlar: Facilidade de uso com placas como Arduino e Raspberry Pi.
- Custo-benefício: Geralmente são mais baratos que outros tipos de motores.
- Disponibilidade: Fácil de encontrar em lojas de eletrônica.
Desvantagens:
- Menor precisão: Comparados a outros tipos de motores, podem apresentar menor precisão em aplicações que exigem alta precisão.
- Ruído: Podem gerar ruído durante o funcionamento.
Servomotores
Os servomotores são motores DC com um circuito interno que permite controlar a posição do eixo de saída com alta precisão. Eles são ideais para aplicações que exigem movimentos precisos e repetitivos, como braços robóticos e robôs seguidores de linha.

Vantagens:
- Alta precisão: Permitem controlar a posição do eixo com grande precisão.
- Versatilidade: Podem ser utilizados em diversas aplicações.
- Fácil integração: Muitos modelos possuem interfaces digitais, facilitando a integração com microcontroladores.
Desvantagens:
- Custo: Geralmente são mais caros que os motores DC simples.
- Limitação de rotação: A rotação é limitada a um ângulo específico.
Motores de Passo
Os motores de passo são motores que se movem em incrementos angulares definidos, ou passos. Eles são ideais para aplicações que exigem um controle preciso da posição, como impressoras 3D e máquinas CNC.

Vantagens:
- Alta precisão: Permitem um controle preciso da posição.
- Boa resposta: Respondem rapidamente aos comandos.
- Posicionamento preciso: Podem ser posicionados em qualquer ângulo desejado.
Desvantagens:
- Complexidade: Requerem controladores mais complexos para operar.
- Ruído: Podem gerar ruído em altas velocidades.
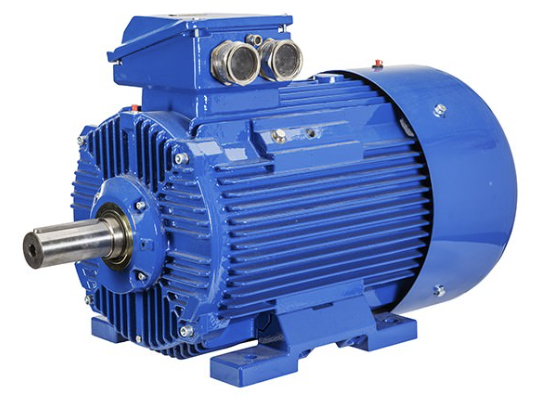
Motores AC (Corrente Alternada)
Os motores AC são menos comuns em robótica, mas podem ser utilizados em aplicações que exigem alta potência ou altas velocidades.
Vantagens:
- Alta potência: Capazes de gerar alta potência.
- Alta velocidade: Podem atingir altas velocidades.
Desvantagens:
- Complexidade: Requerem controladores mais complexos.
- Custo: Geralmente são mais caros que os motores DC.
Escolhendo o Motor Certo
A escolha do motor ideal depende da aplicação. É importante considerar fatores como:
- Torque: A força necessária para mover a carga.
- Velocidade: A velocidade máxima desejada.
- Precisão: A precisão necessária para o movimento.
- Custo: O orçamento disponível.
- Tamanho e peso: As dimensões e o peso do motor.
Os motores são componentes essenciais para a construção de robôs. A escolha do motor certo depende das características da aplicação. Ao entender os diferentes tipos de motores e suas características, você poderá escolher o motor ideal para o seu projeto robótico.
Para saber mais sobre motores para robótica, você pode consultar os seguintes recursos:
- Escolhendo motores para robôs
- Motor elétrico: principais tipos e como funcionam
- O Futuro da Robótica: Um Mundo de Possibilidades
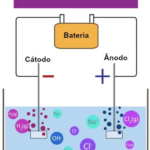
- Eletrólise da Água – Blog Pura Robótica
Lembre-se: A escolha do motor é apenas um dos muitos aspectos a serem considerados na construção de um robô. É importante ter em mente que a robótica é uma área em constante evolução, e novas tecnologias e materiais estão sendo desenvolvidos a todo momento.